Coming soon
Add more features using our RAPP store!
Cognitive Games
Initially, a set of cards with images are shown upside down. Cards contain pairs of images. The game consists in the getting all the pairs of two cards. If both cards have the same image, the score will be increased, otherwise the cards will roll again. The game is won when the all pairs of images are found. There are 3 types of levels depending on the number of cards. It can be 8, 12 or 16 cards. The player can choose to leave the game or if he/she has not returned any cards he can turn over all face cards for a short period of time.
This game is included for free within any purchased INCARE system.
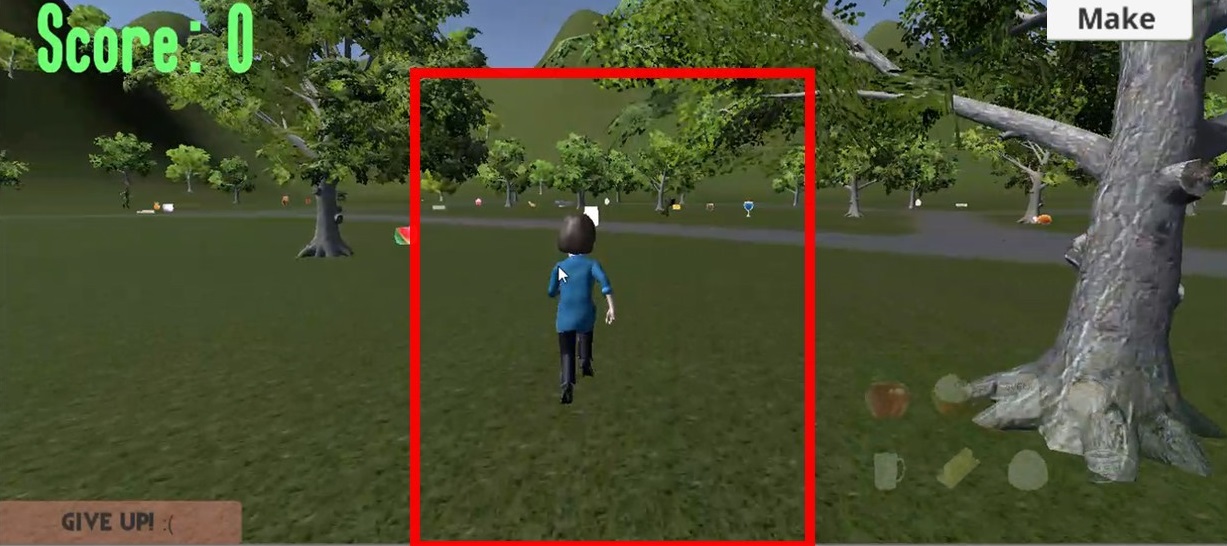
The game “Collect&Create” contains two mini games that are based on collecting different objects that depending on the game will be used to make a pie or to make a puzzle. The player has an avatar that is controlled by touch screen gesture. The avatar is placed in a 3D environment.
This game is included for free within any purchased INCARE system.
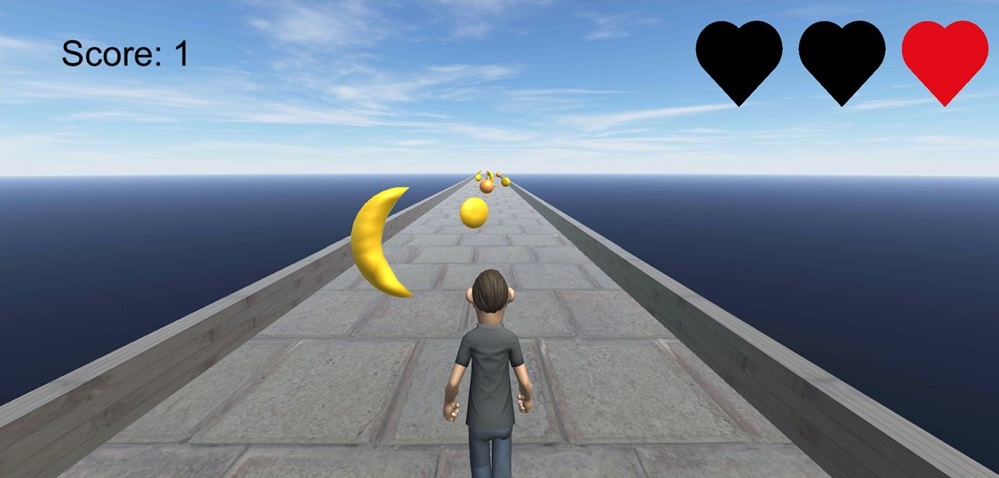
The player is placed on a road on which he / she must collect one type of object that is shown at the beginning of the game. The object is randomly generated between a collection of predefined objects.
This game is included for free within any purchased INCARE system.
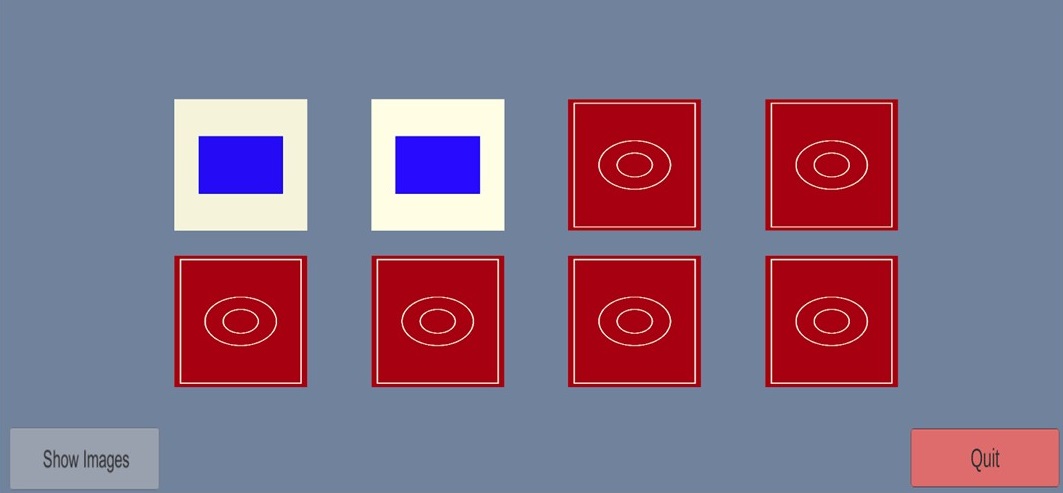
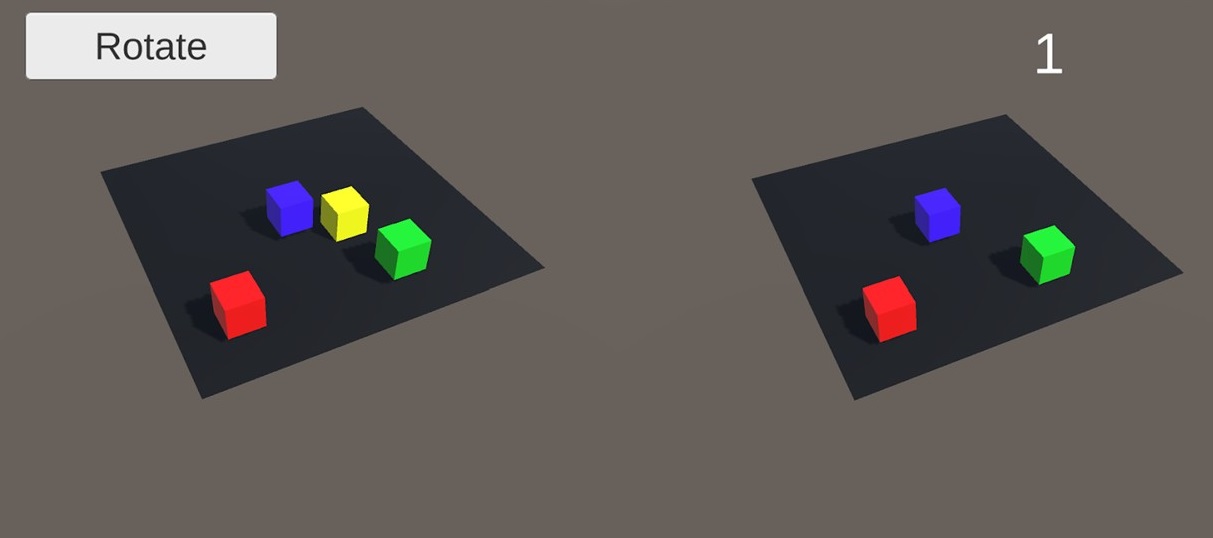
The game consists in 2 scenes: left and right. The left scene is different from the right one. It may contain:
- different objects from the right scene.
- Or same objects (as on the right) but some of them are rotated compared with the objects from the left image.
When the player click on the left side on the object that isn’t on the right side / or has a different orientation, the color will be changed in gray (it wouldn’t be clicked in future).
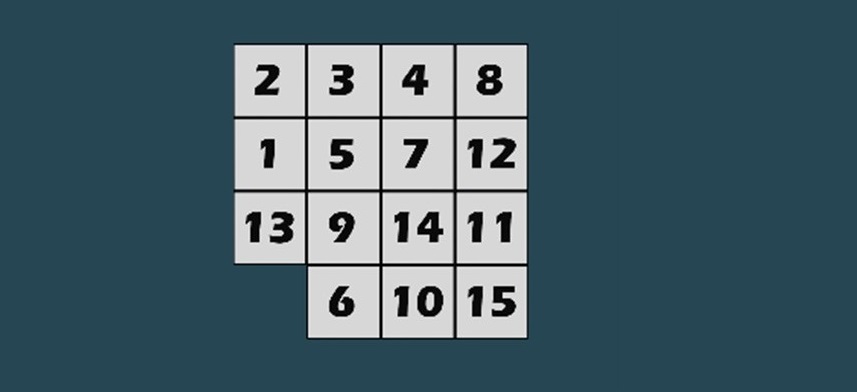
The game consists in 15 squares with numbers and an empty square arranged in the form of 4 x4 grid (4 rows and 4 columns). The squares contain numbers from 1 to 15. Initially, all these numbers are shuffled. The player must arrange the numbers in an ascending order.
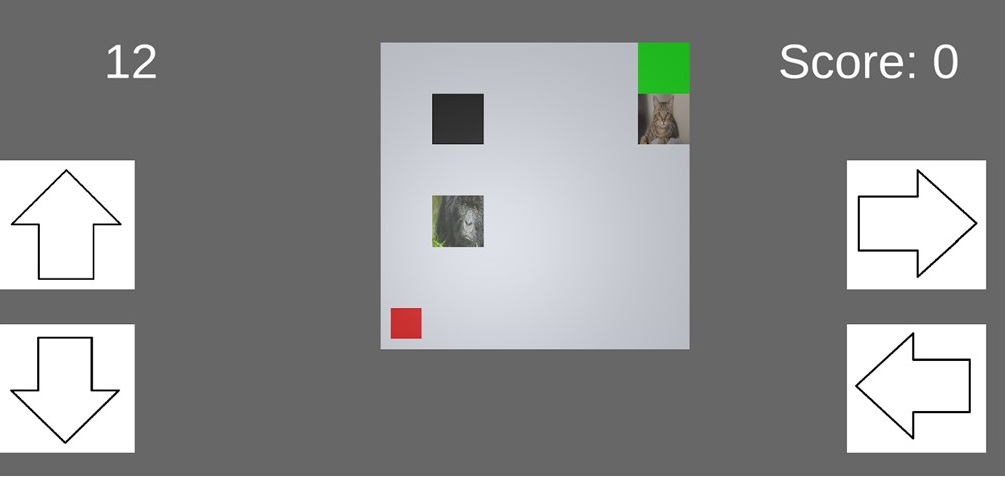
The game consists in moving a red square through a maze.
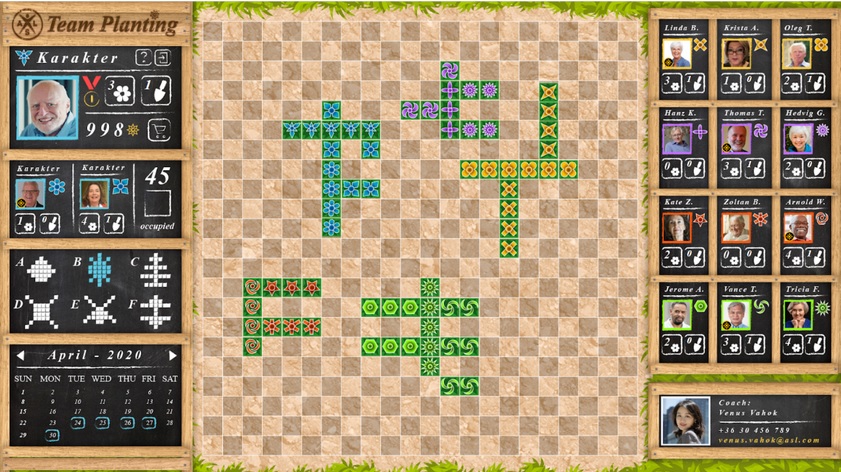
Multiplayer Games
Game for Team (G4T) – Team planting version is part of Active Silver Life (ASL) Activation Framework. The goal of this framework is to increase activity level of elderly people, in the social, physical, and cognitive domain. Motivation of elderly people is supported by Game for Team gamification system. Simultaneous cooperative and competitive gameplay energizes social life and strengthens connections. Players receive their game points on daily basis, based on the completion rate of their activity plan in ASL calendar.